1.1 Definition of Mechanics and scope of Applied Mechanics 1.2 Concept of Particle, Rigid Body, Deformable Body 1.3 Review of vectors and its laws
1.4 Definition of a force, units, representation by a vector and by Bow’s notation, Characteristics of a Force and its Effects
1.5 Classification of Forces Based to Plane and Line of Action: Internal, External, Translational, Rotational, Coplanar, Non-Coplanar, Concurrent, Non-Concurrent, Like Parallel and Unlike Parallel Forces.
1.6 Resolution and Composition of Forces: Methods of Resolution, Perpendicular Components and Non-Perpendicular Components
1.7 Principle of Transmissibility of Forces
1.8 Resolution of a Force into a Force and a Couple
1.9 Moment of a Force: Definition, Measurement of Moment of a Force, Units, Geometrical Interpretation of Moment, Classification of Moments According to Direction of Rotation, Sign Convention, Law of Moments, Varignon’s Theorem of Moment and its Application
1.10 Couple: Definition, Units, Measurement of a Couple, Properties of Couple, its use.
1.1 Definition of Mechanics and Scope of Applied Mechanics
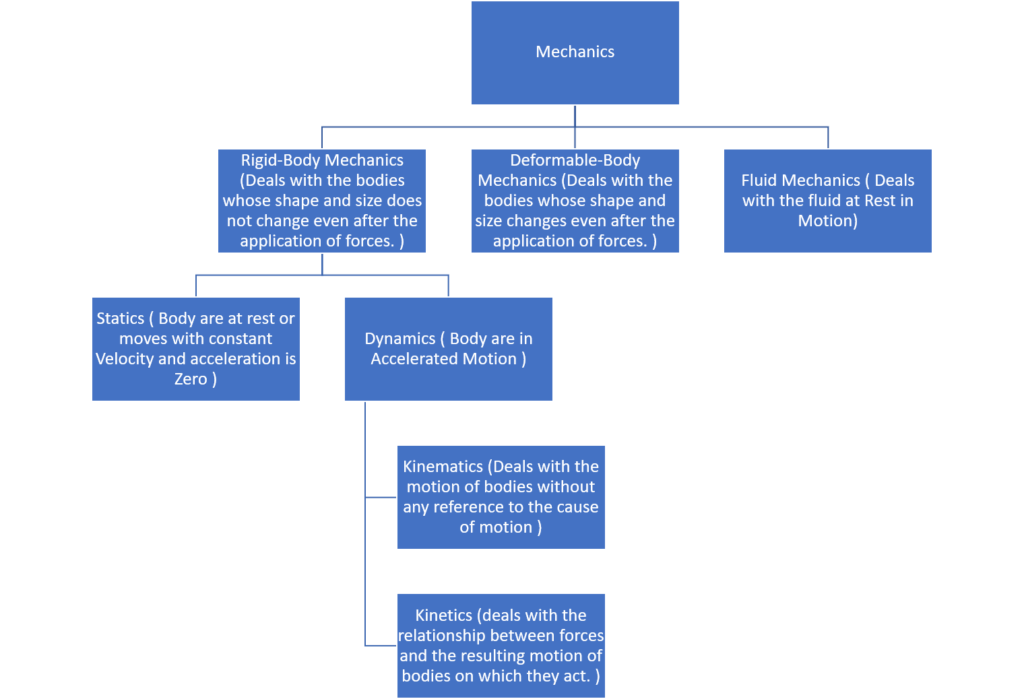
Mechanics is a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. In general, this subject can be subdivided into three branches:
1.Rigid-body mechanics
2.Deformable-body mechanics
3.Fluid mechanics.
Scope of Applied Mechanics
1. Civil Engineering
a.Structural Analysis and Design: Applied mechanics helps in understanding and designing structures like buildings, bridges, and dams to withstand various loads and stresses.
b.Earthquake Engineering: It involves analyzing and designing structures to resist seismic forces.
c.Geotechnical Engineering: Mechanics principles are used to study soil behavior, foundation design, and earth retaining structures.
2. Mechanical Engineering
a.Machine Design: Applied mechanics is fundamental in designing mechanical components such as gears, bearings, and shafts to ensure they can handle operational loads.
b.Dynamics and Vibrations: Analysis of mechanical systems to understand their dynamic behavior and control vibrations for improved performance and longevity.
c.Thermal Systems: Studying heat transfer and thermodynamics to design efficient heating, cooling, and energy systems.
3. Environmental Engineering
a. Water Resource Management: Application of fluid mechanics in designing systems for water supply, wastewater treatment, and flood control.
b.Pollution Control: Mechanics principles used to design systems for controlling air and water pollution.
c.Sustainable Engineering: Design of systems and structures with minimal environmental impact, focusing on renewable energy and resource efficiency.
1.2 Concept of Particle, Rigid Body, Deformable Body
a. Particle A particle has a mass, but a size that can be neglected. For example, the size of the earth is insignificant compared to the size of its orbit, and therefore the earth can be modeled as a particle when studying its orbital motion. When a body is idealized as a particle, the principles of mechanics reduce to a rather simplified form since the geometry of the body will not be involved in the analysis of the problem.
b.Rigid Body A body having a fixed shape and size on the application of extra forces is a rigid body. It consists of several particles at a constant distance from each other.
c. Deformable Body A body whose shape and size change on application of extra forces is a rigid body.
1.3 Review of vectors and its laws
Scalar A scalar is any positive or negative physical quantity that can be completely specified by its magnitude. Examples of scalar quantities include length, mass, and time.
Vector A vector is any physical quantity that requires both a magnitude and a direction for its complete description. Examples of vectors encountered in statics are force, position, and moment. A vector is shown graphically by an arrow.
a. Dot product If A ⃗ and B ⃗ are two vectors and θ is the angle between them, then the dot product is defined as A ⃗ .B ⃗ =| A ⃗ || B ⃗ |cos θ = ABcosθ. The result of the dot product of two vectors is scalar. So it is also called scalar product.
Properties of Scalar Product
1. A ⃗ .B ⃗ =( B) ⃗. A ⃗
2. A ⃗.(B ⃗ + C ⃗ ) = A ⃗ . B ⃗ + A ⃗ . C ⃗
3 .i ⃗. i ⃗ = j ⃗ . j ⃗ = k ⃗ . k ⃗ =1
4. i ⃗. j ⃗ = j ⃗ . k ⃗ = k ⃗ . i ⃗ =0
b.Cross Product If A ⃗ and B ⃗ are two vectors and θ is the angle between them, then the cross product is defined as A ⃗ x B ⃗ =| A ⃗ || B ⃗ |sin θ n ̂ .The result of the cross product of two vectors is again a vector. So it is also called vector product.
Properties of Vector Product
1.A ⃗ x B ⃗ = – B ⃗ X A ⃗
2.A ⃗X(B ⃗ + C ⃗ ) = A ⃗ X B ⃗ + A ⃗ X C ⃗
3.i ⃗. i ⃗ = j ⃗ . j ⃗ = k ⃗ . k ⃗ =0
4.i ⃗. j ⃗ = k ⃗
5.j ⃗ . k ⃗ = i ⃗ 6.k ⃗ . i ⃗ = j ⃗
c. Triangle Law of Forces “If two forces acting simultaneously on a body are represented by the sides of a triangle taken in order, their resultant is represented by the third side of the triangle taken in the opposite order.
R ⃗ = P ⃗ + Q ⃗

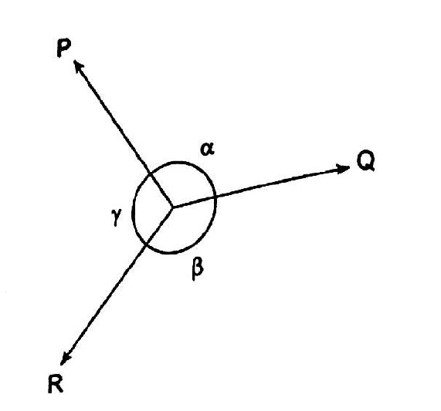
d. Lami’s Theorem “If a body is in equilibrium under the action of three forces, then each force is proportional to the sine of the angle between the other two forces.“
P/sinβ = Q/sinγ = R/sinα
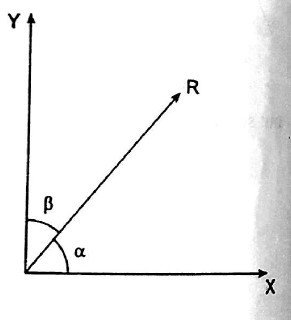
e.Resolution of Forces Considering angle α, Rx= Rcosα Ry=Rsinα
Considering angle β, Rx= Rcosβ Ry=Rsinβ
1.4 Definition of a force, units, representation by a vector and by Bow’s notation, Characteristics of a Force and its Effects
Force: Force is something that changes or tends to change the state of rest or of uniform motion of a body in a straight line. Force is the direct or indirect action of one body on another. The force has a magnitude and direction, therefore, it is a vector.
Units of Force:
FPS system: In the F.P.S. (Foot-Pound-Second) system the absolute unit of force is a poundal which is that much force that produces an acceleration of 1 ft/sec2 in a mass of one pound.
C.G.S System In the C.G.S. (Centimetre-Gram-Second) system the absolute unit of force is dyne which is that much force that produces an acceleration of 1 cm/sec2 in a mass of one gram.
MKS System In the M.K.S. (Metre-Kilogram-Second) system the absolute unit of force is a Newton which is that much force that produces an acceleration of 1 m/sec2 in a mass of the kilogram.
1 newton = 105 dynes.
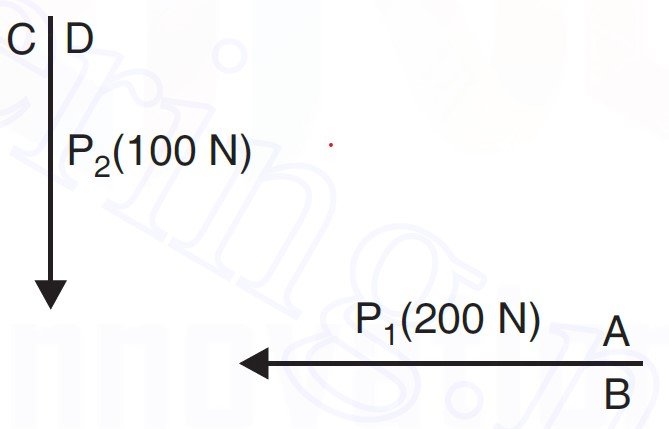
Bow Notation It is a method of designating a force by writing two capital letters one on either side of the force a shown in Fig where force P1 (200 N) is represented by AB and force P2 (100 N) by CD.
Characteristics of force: The characteristics or elements of the force are the quantities by which a force is fully represented. These are: 1. Magnitude (i.e., 50 N, 100 N, etc.)
2. Direction or line of action (angle relative to a coordinate system).
3. Sense or nature (push or pull).
4. Point of application.